Technical Specifications
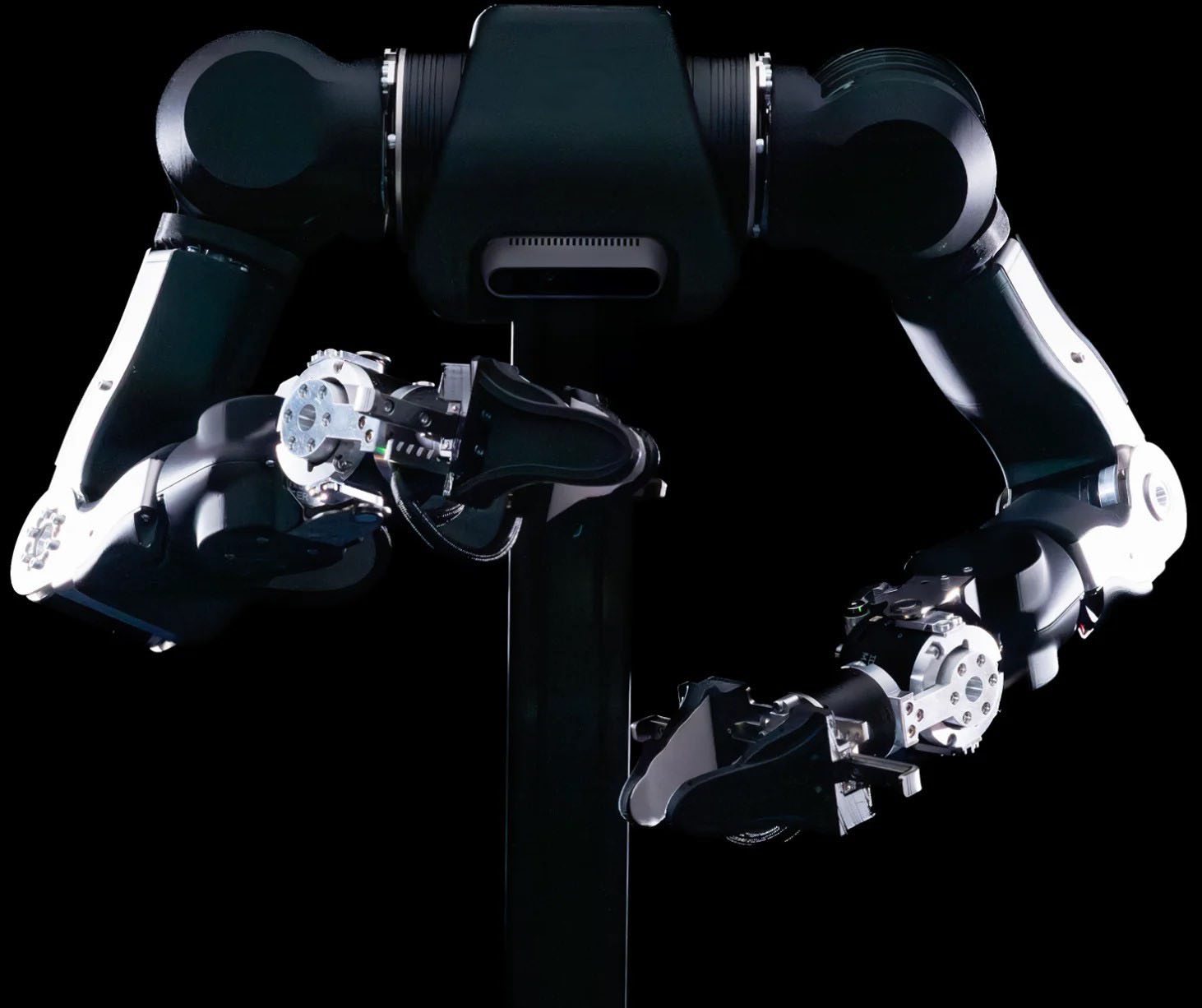
Advanced Engineering
Our robotic arm combines precision engineering with modern materials to deliver exceptional performance in a compact form factor.
- Reach: 633mm
- Peak Payload: 4.1-6Kg
- Degrees of Freedom: 7DOF
- Precision: ±0.2mm
- Control Interface: CAN-FD
- Power Requirements: 24/48V DC
- Operating System: Linux,
- Programming Languages: Python,Rust ,C++